はじめに
Stereo 3D Vision Systemから、3D Modelを作成する前に、使用するステレオカメラを校正する必要が在ります。本稿では、そのステレオカメラの校正を行いました。以下の2つのプログラムを作成し、ステレオカメラの校正を行っています。
- Stereo Camera Calibration Program
- Left-Right Camera Calibration Program
- Left Camera Routine
- Right Camera Routine
校正データはハードディスクに保存され、Stereo 3D Display Programのインプットとして使用されます。
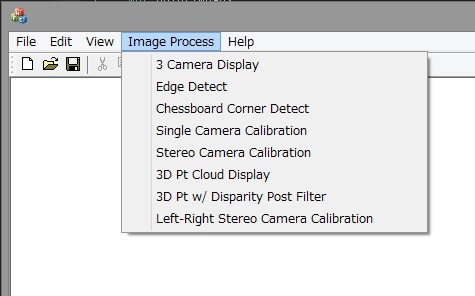
Stereo Camera Calibration Program
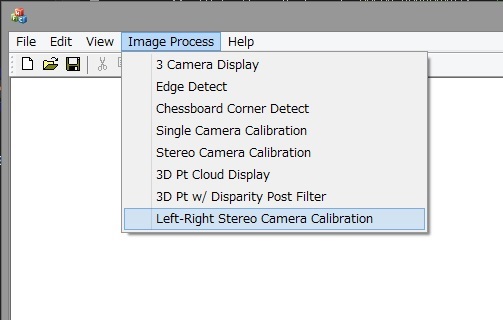
このプログラムは、ステレオカメラ(2台の平行に並べられ、1つの物体を同時に見る様に設定されたカメラ)のパラメーターを計算/校正します。Stereo Camera Calibrationのメニューは上から5番目です。
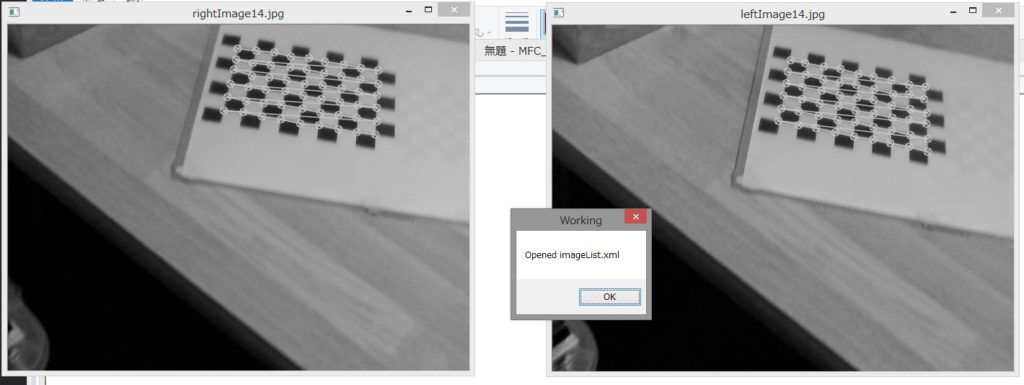
InputList.xml ファイル中にリストアップされた画像ファイルを読み込んで、ステレオカメラの校正をします。
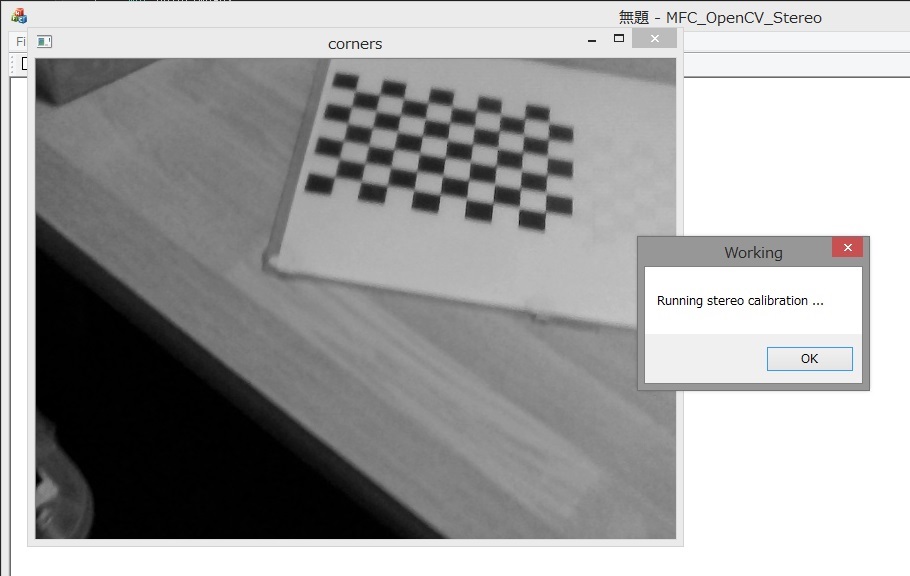
ステレオカメラ校正中
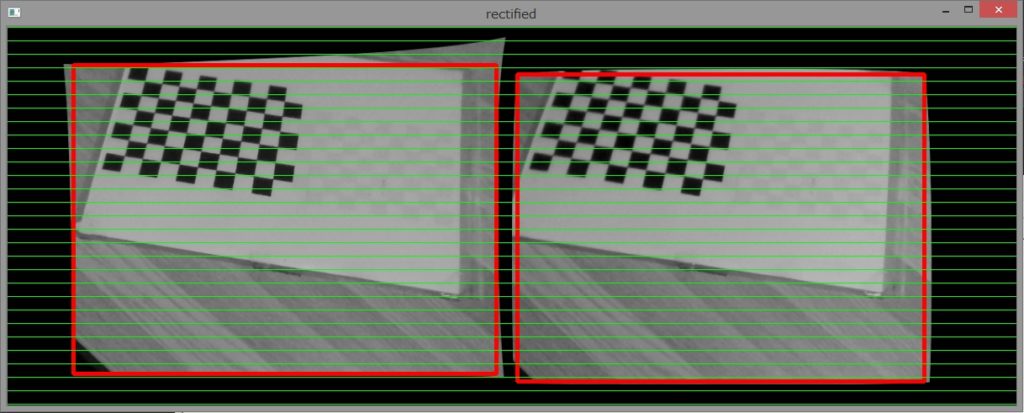
ステレオカメラ校正完了
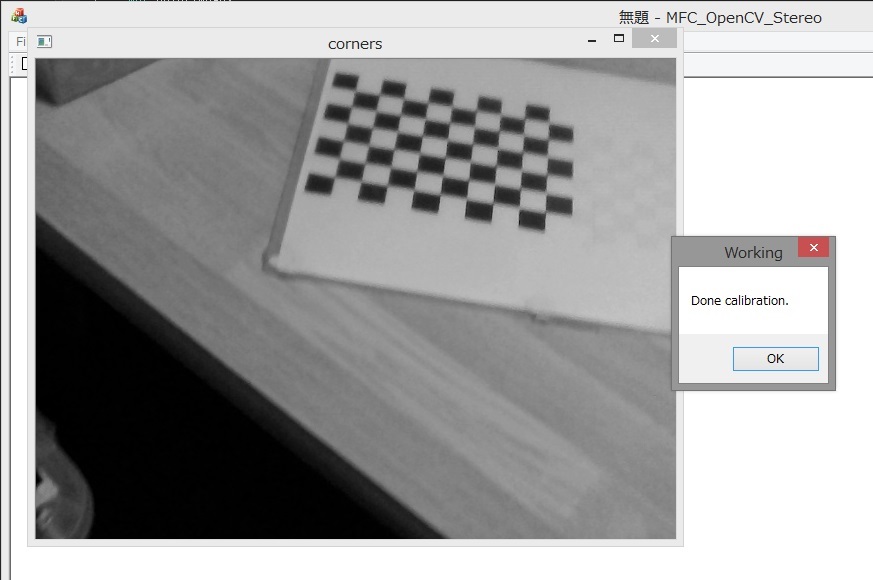
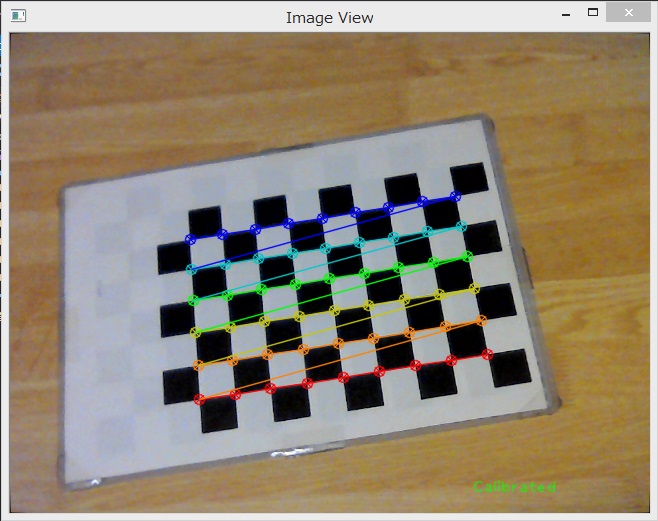
Input画像を修正し、表示します。
How it’s done: Stereo Camera Calibration. はこちら
Input Data Files for Camera Calibrationはこちら
Output Data Files for Camera Calibrationはこちら
Left-Right Camera Calibration Program
このプログラムはステレオカメラの左カメラと右カメラを順に2-Dで校正します。
主に、左右カメラの焦点距離を計算する為に使っています。
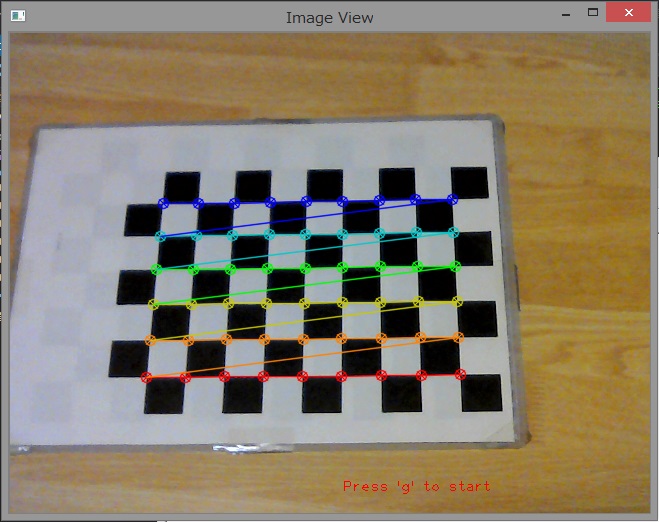
Left Camera Routine
先ずは、左カメラから校正します。
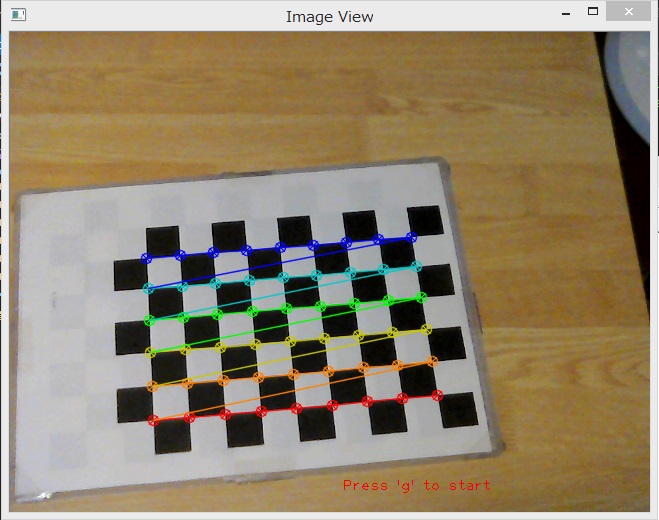
“g” を入力して開始。
校正中…
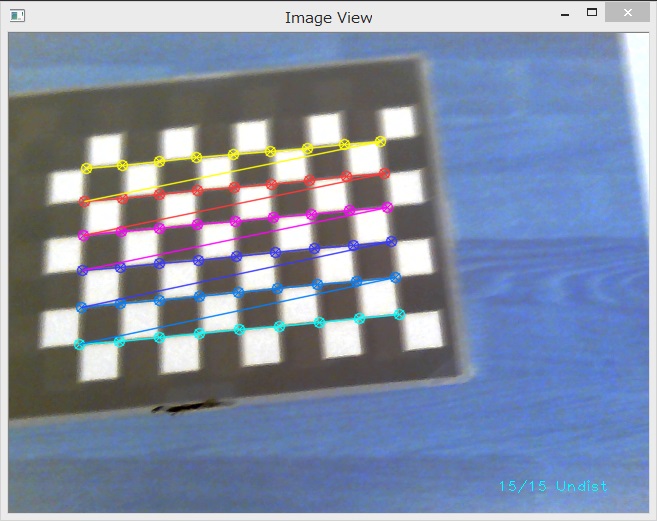
修正画像を表示します。
左カメラの焦点距離は930.1mm。
Right Camera Routine
次に、右カメラを校正します。
“g” を入力して開始。
校正中…
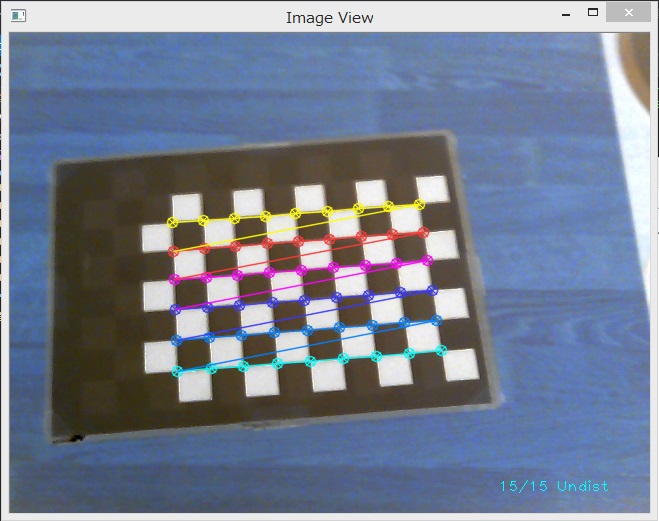

修正画像を表示します。
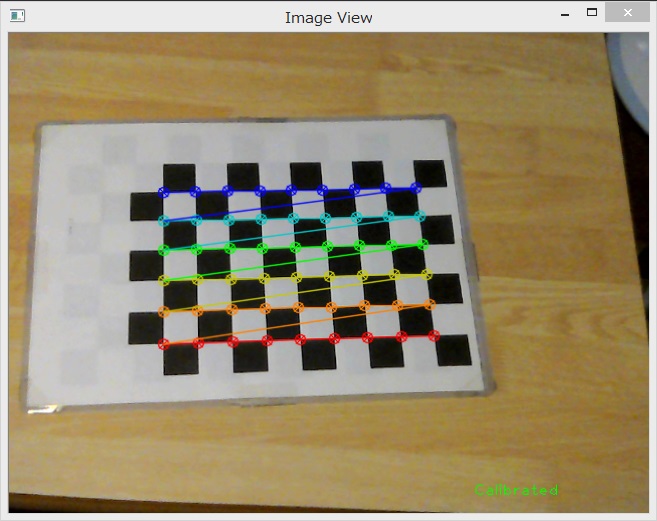
右カメラの焦点距離は953.7mm。
How it’s done: Left-Right Camera Calibration. はこちら
まとめ
如何でしたか。本稿では Stereo Camera Calibration Programを作成し、実行してみました。最後までお読みいただき、ありがとうございました。

コメント
この記事へのコメントはありません。