はじめに
本稿では、Visual C++でStereo 3D Cloud Displayプログラムを作成し、実行しました。その方法としては、Stereo Calibration Programを実行して得たデータ使って、左右のステレオカメラからのインプット画像からStereo 3D Modelを作成します。次の2通りのプログラムで3D Modelを作成してみました。
- Stereo 3D Cloud Display without Post-Filter
- Stereo 3D Cloud Display with Post-Filter
それでは、参りましょう。
Stereo 3D Cloud Display without Post-Filter
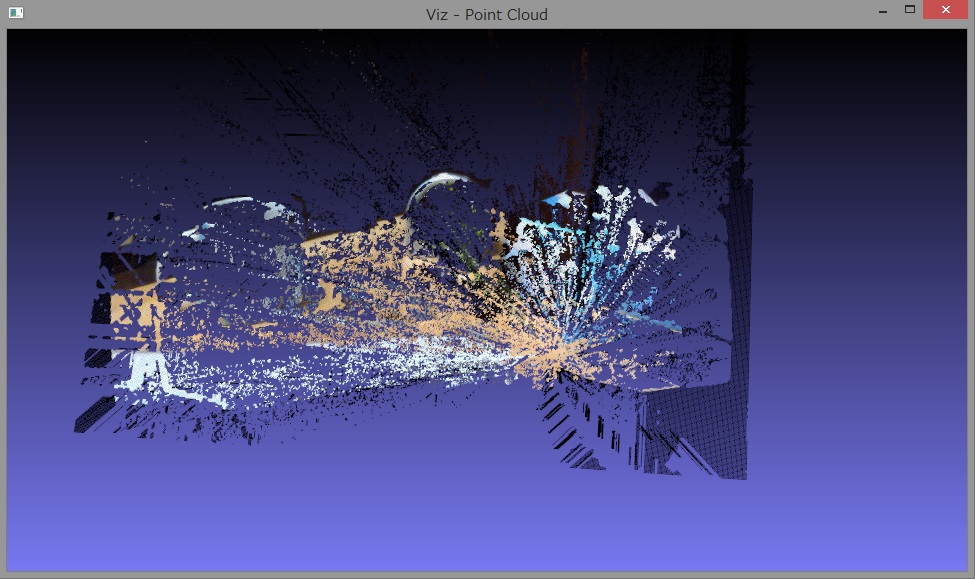
先ず、このプログラムではPost-Filterを使わず3D Model作成してみました。OpenCVのStereo 3D Cloud Displayでは、先にDisparity Mapを作成して、そのデータから3D Modelを組み立てております。そのため、ノイズに非常に敏感であり、結果からもそれが確認できます。
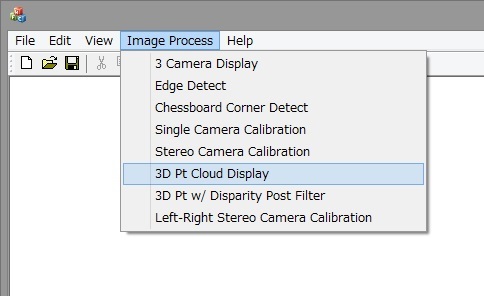
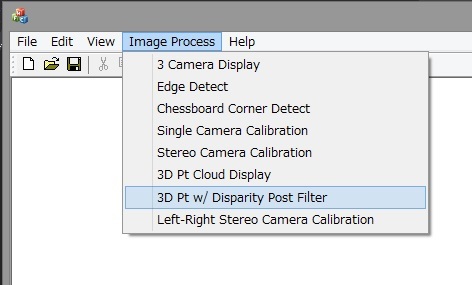
Stereo 3D Cloud Display without Post-Filterメニュー選択
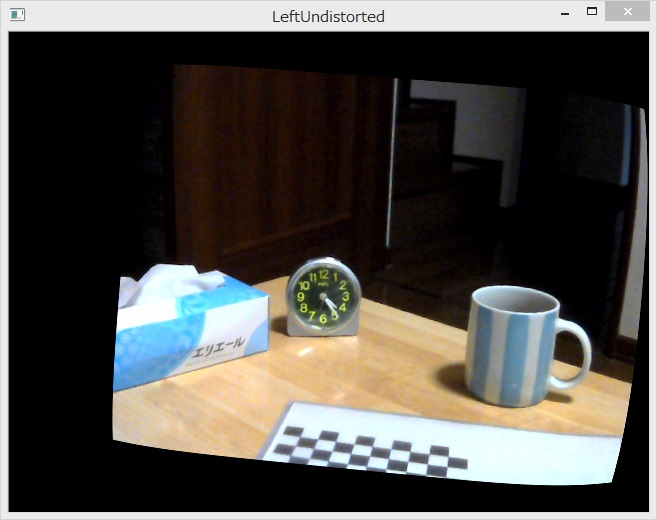
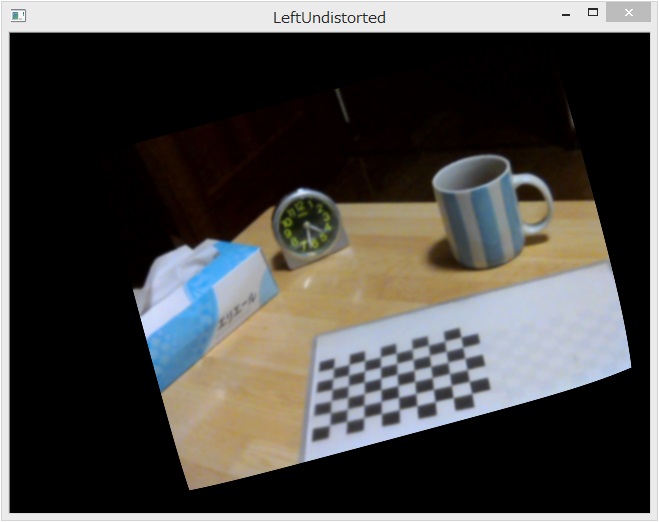
左側カメラの歪除去画像
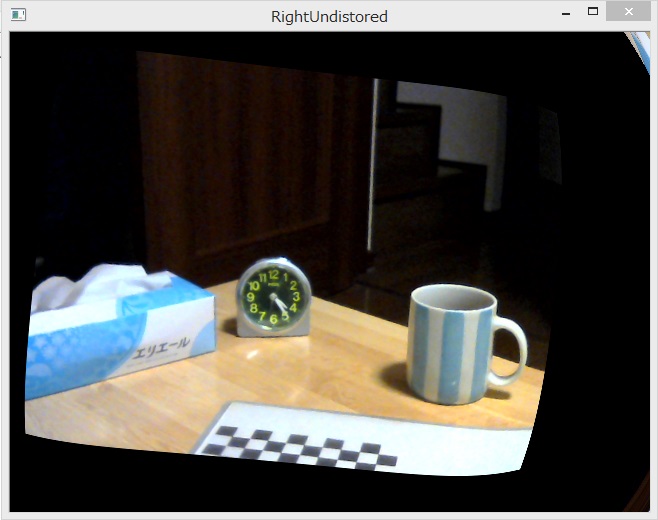
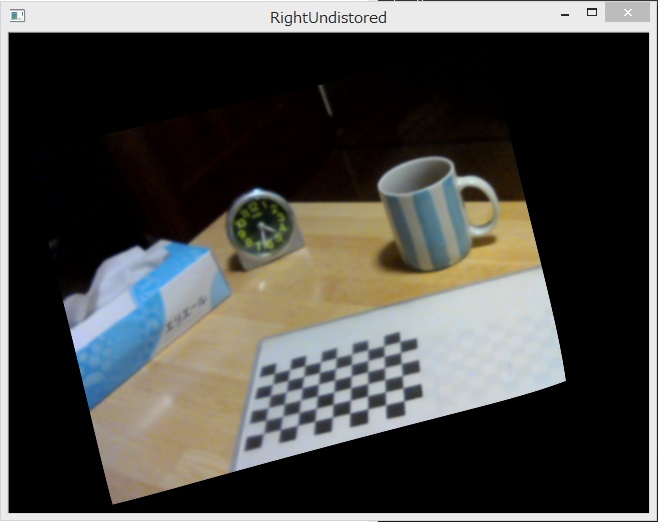
右側カメラの歪除去画像
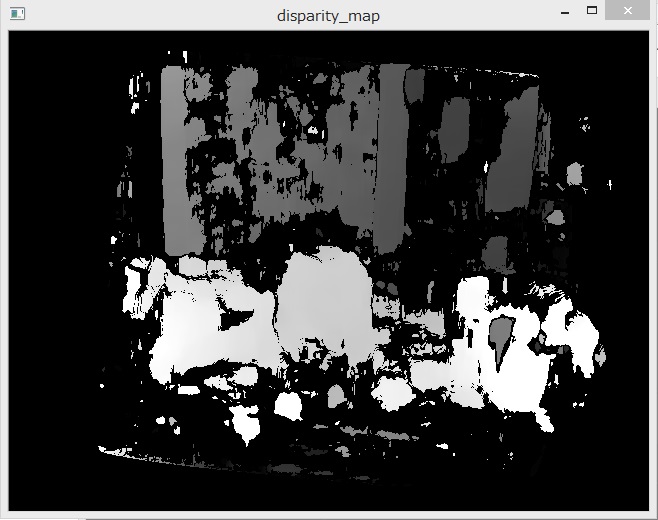
Disparity Mapping 画像
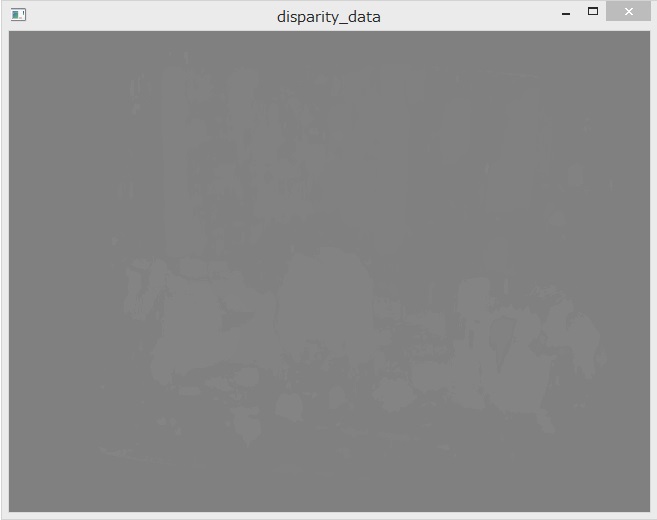
補正 Disparity Mapping 画像
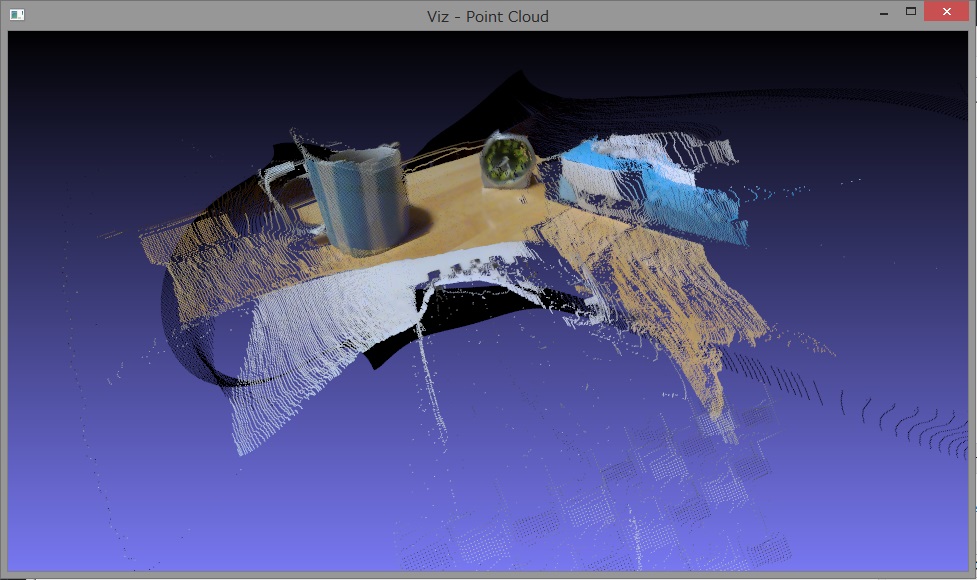
3D Cloud Display
How it’s done: Stereo 3D Cloud Display without Post-Filter. はこちら
Stereo 3D Cloud Display routine のみでは、ノイズが大きく出て、上手く表示出来ません。ここで、Post-Filter を使います。
Stereo 3D Cloud Display with Post-Filter
次に、Post-Filterを使って3D Model作成してみました。Post-Filterはノイズ除去の役割を担っており、結果からもその効果がはっきり見られます。
Stereo 3D Cloud Display with Post-Filterメニュー選択
左側カメラの歪除去画像
右側カメラの歪除去画像
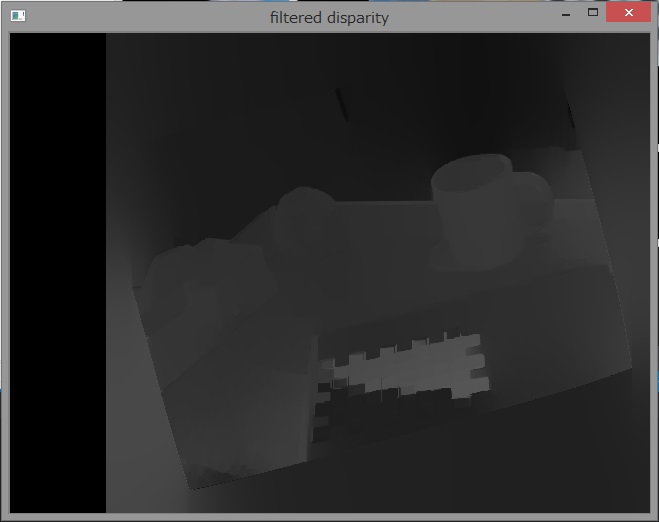
Disparity Mapping 画像

補正された Disparity Mapping 画像
3D Cloud Display with Post-Filter
How it’s done: Stereo 3D Cloud Display with Post-Filter. はこちら
まとめ
如何でしたか。本稿では、Visual C++でStereo 3D Cloud Displayプログラムを作成し、実行しました。最後までお読みいただき、ありがとうございました。

コメント
この記事へのコメントはありません。